
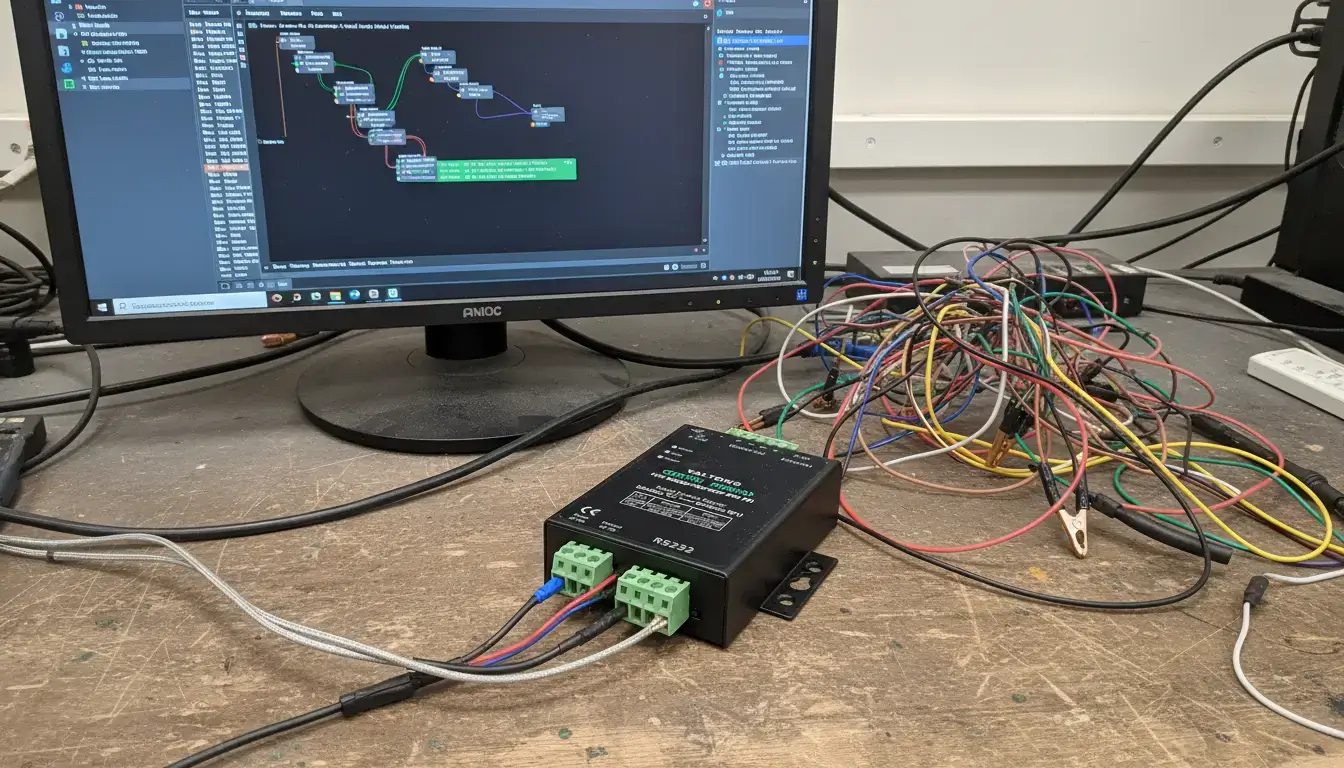
In industrial data acquisition architectures, using the node-red-contrib-modbus plugin to interface RS485 devices, can often lead to Node-RED Modbus RTU timeouts. The debug console usually loops with the same messages like Error: Timed out waiting for response messages, followed by Reconnecting in 10s status loops.
This technical document contains an objective analysis of the factors leading to serial communication instability in the Node-RED environment. It deals with physical layer collisions on RS485, operating system interrupt latency, software queue management and physical decoupling strategies.
Level 1 Physical Diagnosis Checklist
Verify the electrical layer before debugging software queues. Check the boxes to confirm status.
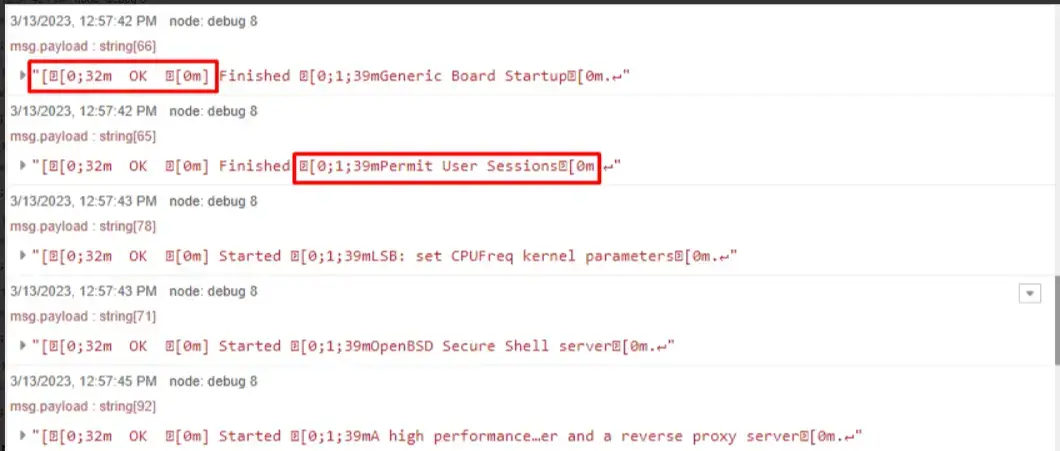
Figure 1: Node-RED debug logs often reveal serial communication instability.
Why Your Node-RED Flow is Choking on Modbus RTU
Node-RED is based on Node.js, an asynchronous event-driven runtime environment for running concurrent tasks. When multiple Modbus Read nodes are configured on the canvas, Node-RED will attempt to make those data requests at the same time.
Conversely, RS485 is a half-duplex, differential signaling physical bus. It permits only one device—either the master node or a single slave—to transmit electrical signals across the two-wire interface at any specific microsecond. Concurrent software requests directed at a single serial port result in direct signal collisions on the RS485 bus. Corrupted frames with invalid Cyclical Redundancy Checks (CRC) are received by the slave devices. The slaves discard the invalid packets and generate no response, which Node-RED registers as a timeout event.
The “One Dead Slave Kills the Bus” Nightmare (And How to Fix It)
In daisy-chained serial networks, the offline status of a single device heavily degrades the polling performance of the entire bus. When the Node-RED Modbus node queries a disconnected slave, the host serial port remains locked in a listening state until the configured timeout parameter expires.
Because serial queries are queued sequentially at the hardware interface, requests destined for healthy devices are blocked behind the offline device’s request. For example, two offline devices with a 2000ms timeout parameter introduce a 4000ms delay into every polling cycle.
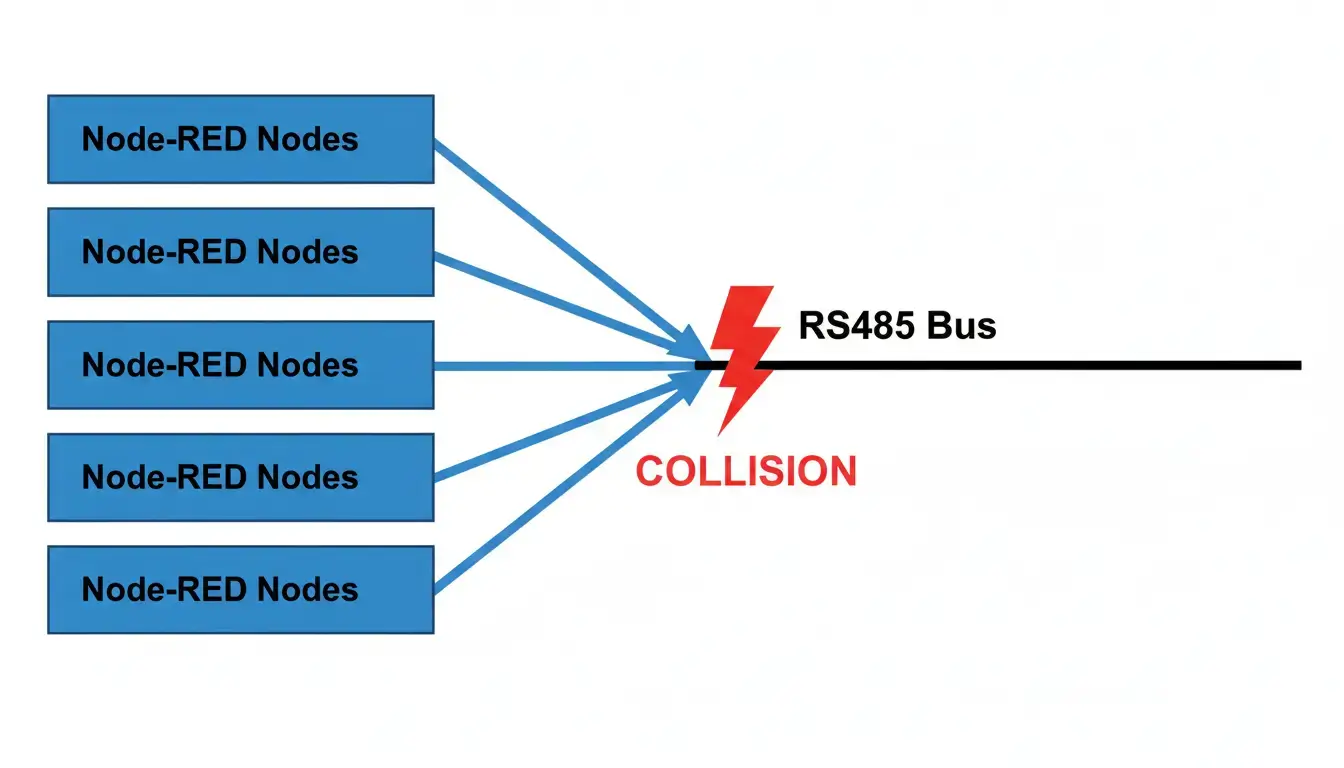
Figure 2: Concurrent requests from Node-RED colliding on a half-duplex RS485 bus.
The OS Jitter Factor: Deep Dive into Protocol Timing
Even if you avoid parallel requests, you might still encounter erratic timeouts. This is primarily due to Operating System Jitter. Standard operating systems running Node-RED (like Windows or Linux) use pre-emptive task schedulers, which are not designed for the hard real-time requirements of serial communication. When the OS experiences CPU spikes, it can momentarily pause the USB-to-Serial driver.
“It is strongly recommended to use a Real-Time Operating System (RTOS) for Modbus Master implementations to meet the strict timing constraints. Between two frames, always keep a silent interval of at least 3.5 character times.”
— Modbus over Serial Line Specification (V1.02), Modbus Organization.
Per the Node.js Event Loop documentation, timers and I/O callbacks are not guaranteed to be microsecond-precise. If the driver pause exceeds the strict 3.5 character gap times specified by the Modbus protocol, the slave device treats the frame as broken, resulting in unrecoverable parsing errors.
Stop Parallel Polling: Mastering the Queue and Flex-Getter
To eliminate bus collisions, independent Inject nodes must be removed. There should be a structured queuing mechanism at the application level to enforce sequential data acquisition.
The Modbus-Flex-Getter node allows the implementation of a Round-Robin scheduling logic. The JSON config below shows a function node that loops through an array of Slave IDs, doing one query at a time.
The Math Behind Your Timeout: Baud Rate vs. Default Settings
The default 1000ms timeout parameter in Node-RED is frequently mathematically inadequate for serial networks involving high register counts or wireless transparent bridges. The timeout parameter must accommodate the physical transmission time, device processing delay, and operating system latency.
> Modbus RTU Physical Timeout Calculator
Physical Layer Decoupling Architecture
The architectural constraint is to use high-level asynchronous application software that handles microsecond level serial timing. The host CPU overhead for node queue management and serial retries consumes the computing resources.
The industrial standard for high-availability data acquisition is physical layer decoupling. By deploying an edge protocol gateway, the embedded RTOS handles strict RS485 polling and local memory caching independently of the Node-RED server.
| Architecture Method | Host CPU Load | RS485 Collision Risk | Ideal Scenario |
|---|---|---|---|
| Direct Serial + Node-RED Queue | High | Moderate (Prone to OS Jitter) | Lab testing, <3 devices |
| Hardware Gateway (Modbus TCP) | Minimal (TCP handled natively) | Zero (Decoupled by Gateway) | Industrial Production, 24/7 Logging |
Migrating the Node-RED application layer to Modbus TCP communication to natively handle asynchronous concurrency and buffer management, establishing a deterministic telemetry system.
Frequently Asked Questions
What does “FSM Reset On State active” mean in the Node-RED logs?
The Finite State Machine (FSM) reset is due to the internal buffer of the node-red-contrib-modbus client being overwhelmed. This happens when the node is unable to handle the backlog of serial requests queued up or the accumulated timeouts, and the port disconnects suddenly to clear the memory queue.
Can transparent Wi-Fi modules replace a Modbus TCP Gateway?
While standard transparent Wi-Fi or LoRa serial bridges transmit raw data, they introduce severe and unpredictable network latency. This latency frequently violates the Modbus RTU 3.5 character gap rule, causing frame corruption. A protocol-aware gateway is required to convert RTU to standard TCP packets locally before transmission.
What is the recommended polling interval for multiple RS485 slaves?
The interval is strictly governed by the total physical round-trip time of all devices combined. If using a Round-Robin queue, the interval should be set dynamically based on the completion trigger of the previous node.
Require Architectural Support?
If software queue optimization is insufficient for your deployment, contact our engineering team for hardware decoupling gateway recommendations and topology review.
Contact Engineering Support