
If you are the person who has to build up an industrial network, you have probably been in this exact situation: Your serial device server works perfectly when connected to one local HMI. The polling is fresh, and the data is sound. But as soon as you connect a second SCADA system from the central control room to get data from the same RS485 bus at the same time, the network crashes.
Your screens start flashing red. If you hook up a serial sniffer, you won’t see clean Modbus frames—you will see the immediate results of RS485 Data Collisions: garbage data, CRC checksum errors, and Exception Code 0x0B.
When facing this, the instinct for most engineers is to double-check the IP addresses, verify the 120-ohm termination resistors, or adjust the baud rates. Stop troubleshooting your wiring. If your network works perfectly with one master but crashes with two, your physical layer and IP configurations are fine. You are experiencing a fundamental physical layer collision, exposing the fatal flaw of standard transparent gateways.
Here is the engineering breakdown of why multiple Modbus TCP masters crash an RS485 network, why tweaking software timeouts will not save you, and how deploying a “Storage Modbus Gateway” permanently eliminates the bottleneck.
Diagnostic Is Your Network Colliding?
If you see these symptoms, your gateway is likely the bottleneck:
- Stable with one Master, crashes with two.
- Frequent
Exception Code 0x0Bin logs. - High CRC error rate during peak polling.
The Symptom: Why Exception 0x0B Happens with Multiple SCADAs
Across mission-critical industrial environments—such as water treatment plants or hyperscale data centers—one of the most persistent challenges regarding legacy serial integration is handling concurrent polling.
When a standard Modbus TCP to RTU gateway receives a request from a SCADA system, it translates the Ethernet packet into a serial frame and sends it down the two-wire RS485 bus. The destination sensor processes the request, sends the data back to the gateway, and the gateway forwards it to the SCADA.
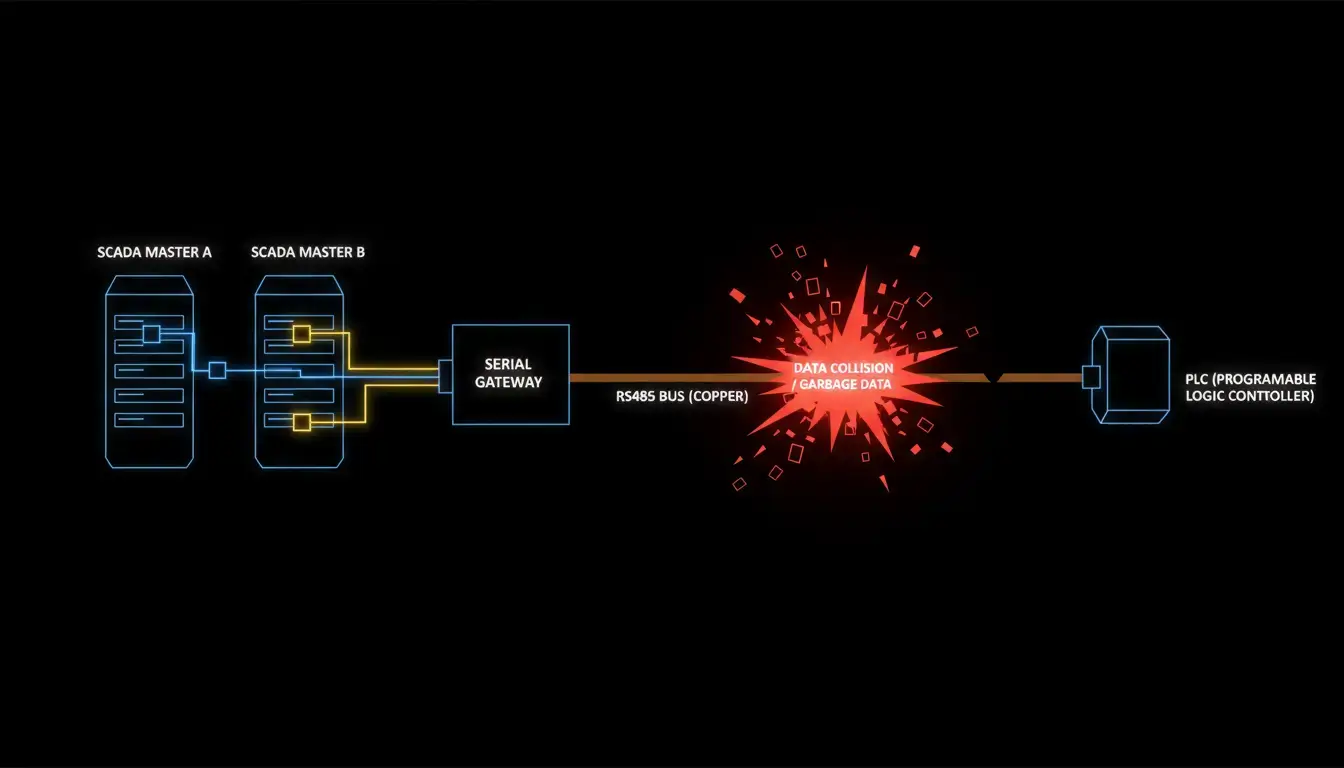
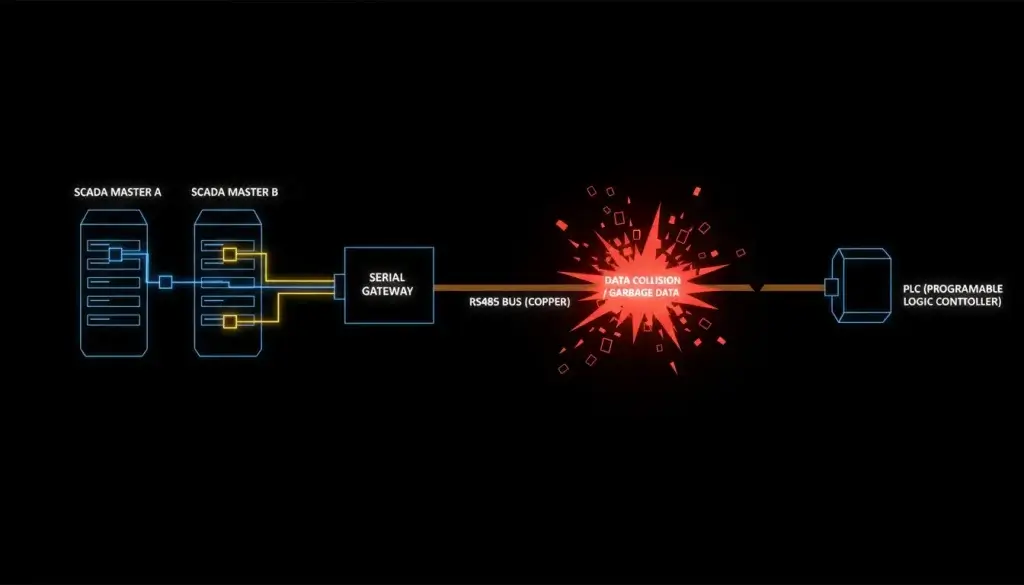
The anomaly occurs when Master A (Local HMI) and Master B (Central SCADA) issue requests at the exact same time.
If your gateway is a standard “transparent” model, it lacks the intelligence to queue these requests. It simply dumps both signals onto the serial line simultaneously. The Modbus TCP specification allows for rapid, concurrent queries, but the destination is an RS485 bus—a physical protocol designed in 1983 that operates strictly on a half-duplex, master-slave architecture.
When the SCADA’s TCP connection waits for a response that never arrives (because the signal was destroyed on the serial side), it drops the connection, throwing the dreaded 0x0B Exception (Gateway Target Device Failed to Respond).
The Root Cause: RS485 Data Collisions & Transparent Gateway Flaws
To truly understand why the network collapses, we must look at the physical layer and the limitations of transparent gateway architectures.
The Half-Duplex Bottleneck
Unlike modern full-duplex Ethernet (which uses Carrier-Sense Multiple Access with Collision Detection, or CSMA/CD, to handle simultaneous traffic), an RS485 bus is a half-duplex single-lane highway. Only one device can “talk” at a time.
When a standard transparent gateway attempts to push requests from Master A and Master B onto the bus at the same time, the electrical voltages merge. The square waves of the digital 1s and 0s overlap and distort. If you hook an oscilloscope to the RX/TX lines during this event, you will not see Modbus frames; you will see complete voltage chaos.
Because the destination RTU device receives an unrecognizable mess of distorted voltage, it fails the CRC (Cyclic Redundancy Check) and simply drops the packet. It remains silent.
The Transparent Gateway Flaw
Standard serial servers are “dumb” conduits. They do not understand the Modbus protocol; they only translate TCP/IP wrappers into serial bits. They have no concept of bus occupation, queuing, or token passing. Relying on a transparent gateway in a multi-master environment is an architectural flaw that guarantees data collision.
Expert Perspective on Protocol Integration:
“A common misconception in OT network integration is treating serial networks like Ethernet. You cannot force IT-level concurrency onto a serial bus. According to the official Modbus Organization Specifications, the master-slave architecture requires strict token management and allows strictly one active transmitter at a time. To bridge these worlds safely, the gateway itself must assume the role of an intelligent traffic controller, not just a passive wire adapter.”
Why Modifying Software Parameters Doesn’t Work
When CRC errors and exceptions start flooding the logs, a control engineer’s first instinct is often to open their Ignition, Wonderware, or FactoryTalk configuration and radically increase the polling delay or timeout thresholds. They might change the SCADA timeout from 1000ms to 5000ms and set the retry count to 3.
This is a critical mistake. Modifying software parameters is a band-aid that exacerbates the root problem.
While increasing the timeout might occasionally allow a packet to survive a re-transmission, it introduces massive polling latency (lag) into your entire SCADA system.
So let’s count it up: Now, at the standard industrial speed of 9600 bps for your RS485 bus, it takes about 30 to 50 milliseconds to send a typical Modbus query, and receive the response.
If Master A and Master B collide, and Master B is programmed to wait 5000ms before retrying, your SCADA system is literally frozen for 5 seconds waiting for a dead packet. If you have 50 devices on the bus, your overall network refresh rate drops from sub-seconds to minutes. The system becomes sluggish and completely unreliable for real-time control.
Software cannot fix a physical layer collision. The solution must reside in the hardware layer.
Download the Multi-Master Architecture Blueprint
Stop guessing with your topology. Get our exclusive engineering PDF on how to segment RS485 collision domains and optimize polling speeds for multiple SCADA masters.
The Hardware Fix: How a “Storage Modbus Gateway” Eliminates Collisions
The definitive engineering solution to multi-master data collisions is replacing the transparent server with an intelligent Storage Modbus Gateway (also known as an Auto Query Gateway or Caching Gateway).
Rather than acting as a passive middleman, a Storage Modbus Gateway acts as an active, independent Super-Master on the RS485 side, and a high-speed data server on the Ethernet side.
| Feature | Standard Transparent Gateway | Valtoris Storage Modbus Gateway |
| Multi-Master Support | Fails (Causes data collisions) | Flawless (Serves multiple TCP requests concurrently) |
| Polling Mechanism | Passive (Waits for SCADA request) | Active (Continuously polls RTU devices automatically) |
| TCP Response Time | Slow (Depends on serial baud rate, typically >50ms) | Ultra-Fast (< 3ms) (Reads directly from internal memory) |
| Network Latency | High (Bottlenecked by 9600bps serial line) | Zero Bottleneck (Ethernet speed is decoupled from serial speed) |
How the 10K Cache Works
Advanced devices, such as the Valtoris 16CH-RS232/485/422-ETH, feature a built-in 10K Modbus Cache.
When configured in Auto Query Storage Type mode via the simple Web GUI (no coding required), the gateway automatically learns the registers being requested by the SCADA systems. It then takes over the job of polling the RS485 devices continuously, at the maximum safe speed the serial bus allows. It stores the latest values of these registers in its high-speed internal RAM.
When Master A (Local HMI), Master B (Central SCADA), and Master C (Cloud Server) all send Modbus TCP requests at the exact same millisecond, the gateway does not send those requests to the serial bus. Instead, it instantly retrieves the requested data from its internal cache and replies to all three masters simultaneously over Ethernet.
The response time drops to under 3 milliseconds. Because the concurrent TCP queries never touch the physical RS485 bus, collisions are mathematically impossible, and Exception 0x0B is permanently eliminated.
Interactive Demo: The Power of Sub-3ms Caching
Click to simulate simultaneous multi-master polling on a standard gateway vs. a Valtoris Storage Gateway.
Advanced Scheduling: Utilizing RS485 Conflict Detection
While the Storage Gateway mechanism handles 95% of data acquisition (read) tasks flawlessly, there are edge cases in complex SCADA environments where direct, transparent “write” commands (e.g., Modbus function codes 0x05 or 0x06 to actuate a valve) must bypass the cache and reach the end device immediately.
Even in these scenarios, advanced industrial gateways prevent bus collisions through RS485 Conflict Detection.
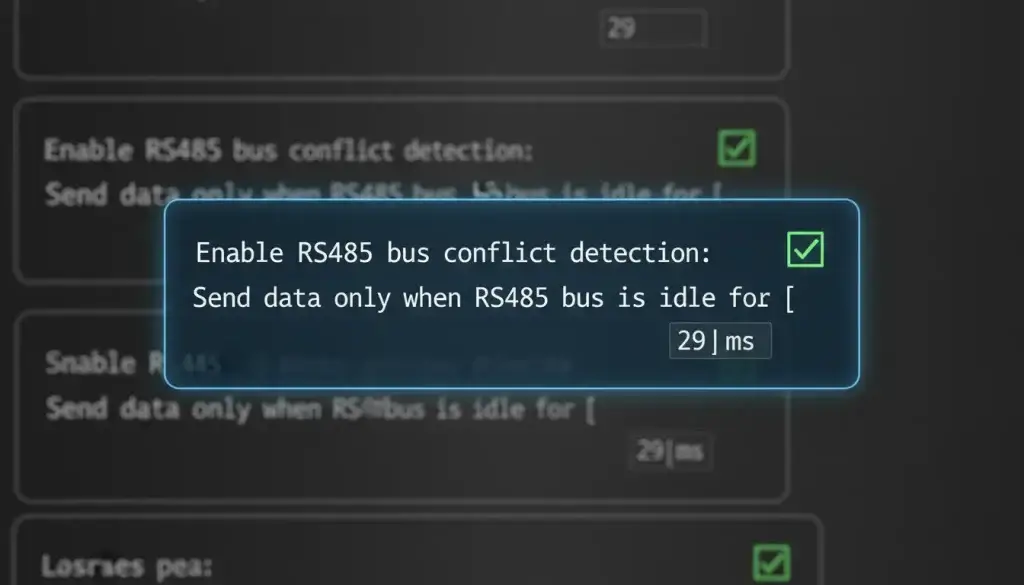
Acting as a highly efficient traffic controller, the gateway continuously monitors the electrical state of the RS485 lines. If Master A and Master B send write commands simultaneously, the gateway intercepts both. It forwards Master A’s command to the bus. Meanwhile, it holds Master B’s command in a temporary buffer.
The gateway waits for Master A’s command to finish, and then enforces a strict Idle Time (for instance, waiting for the bus to be absolutely silent for 29ms). Only when the bus is clean and the token is free does it release Master B’s command.
This micro-scheduling completely eliminates CRC garbage data errors, ensuring that multiple control systems can write to the same PLC network safely and deterministically without requiring any complex software-level interlocking.
Scaling Up: When to Deploy a 16-Port Rackmount Serial Server
Industrial networks rarely stop at two SCADA masters. As your facility grows to include cloud historians, predictive maintenance servers, and edge AI, daisy-chaining dozens of devices on a small gateway becomes a severe liability. You are no longer just connecting wires; you are managing a centralized IT/OT convergence.
In these mission-critical environments, daisy-chaining dozens of devices on a single COM port or relying on scattered, DIN-rail mounted 2-port gateways introduces unacceptable single points of failure.
The Centralized Architecture Solution
To stabilize a massive polling environment, senior automation architects transition to 1U rack-mounted solutions like the Valtoris 16CH-RS232/485/422-ETH.
Deploying a 16-port gateway allows you to execute Network Segmentation. Instead of wiring 60 devices on one fragile, overloaded RS485 trunk, you can split the load across 16 physically isolated serial ports.
- Isolation: If a VFD shorts out the bus on Port 3, Ports 1, 2, and 4-16 remain 100% online.
- Concurrency: Each of the 16 ports operates fully independently, with its own dedicated cache.
- IT/OT Convergence: Standardized 1U mounting and 220V direct power make it seamless to integrate into enterprise server racks next to your IT switches.
Stop troubleshooting physical collisions with software delays. By upgrading to a high-capacity, multi-master Storage Modbus Gateway, you permanently decouple the slow serial world from the high-speed Ethernet world, ensuring your SCADA systems operate with zero data collisions and zero dropped packets.
Ready to Permanently Fix RS485 Collisions?
Stop fighting bus contention and 0x0B exceptions. Deploy a Valtoris Storage Modbus Gateway with 10K Cache to isolate traffic and ensure sub-3ms response times.
Frequently Asked Questions
Q1: Since the gateway serves data from a “Cache,” am I reading outdated or stale data?
A: No. A properly configured Storage Modbus Gateway polls the underlying serial devices much faster than your SCADA system’s request interval. By the time your Modbus TCP request arrives, the data in the 10K cache is typically only a few milliseconds old, easily meeting 99% of real-time industrial requirements.
Q2: How many SCADA masters can simultaneously connect to one Storage Gateway?
A: While standard transparent gateways often freeze or drop connections after just 1 or 2 concurrent masters, industrial storage gateways manage TCP sockets differently. Devices like the [Valtoris 16CH Rackmount Gateway] support up to 8 or 16 concurrent TCP client connections per port. This effortlessly accommodates your local HMI, central SCADA, and cloud historian simultaneously.
Q3: If I use a 16-port gateway to segment my network, do all ports need to share the same baud rate?
A: Absolutely not. Each physical port on a premium multi-port gateway acts as an independent collision domain with its own microprocessor. You can run Port 1 at 9600 bps for legacy power meters, and Port 2 at 115200 bps for modern VFDs without any interference. For help designing a mixed-baud-rate topology, check out our [RS485 Network Design Guide].
Q4: Will upgrading from 2-wire RS485 to 4-wire RS422 eliminate these collisions without needing a caching gateway?
A: Going to RS422 gives full-duplex communication which eliminates physical RX/TX electrical collisions on the wire. However, a transparent gateway will still have a hard time managing and queuing concurrent TCP requests from multiple SCADA masters. That being said you still need some sort of active caching mechanism (whether you use RS485 or RS422) to permanently eliminate TCP socket timeouts and polling lag.
